Human-robot collaborative workspaces supported by AR head-mounted displays
Developer, 3D Modeler
Short Description
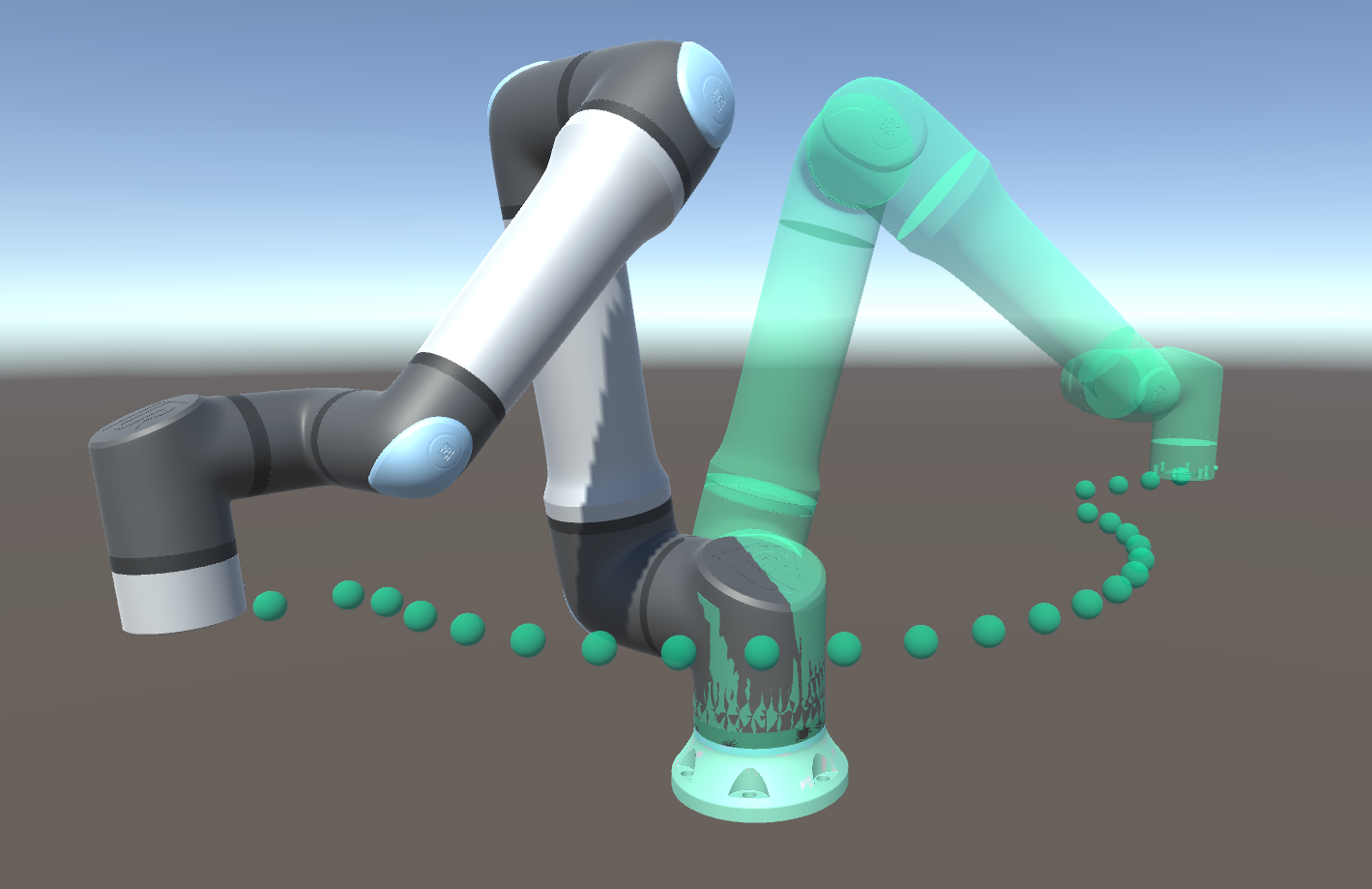
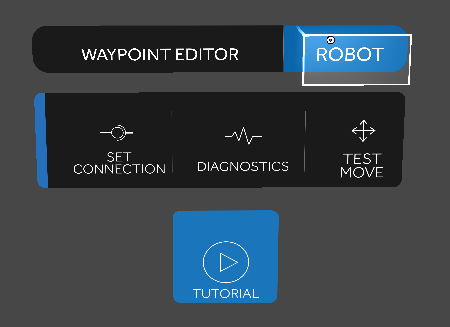
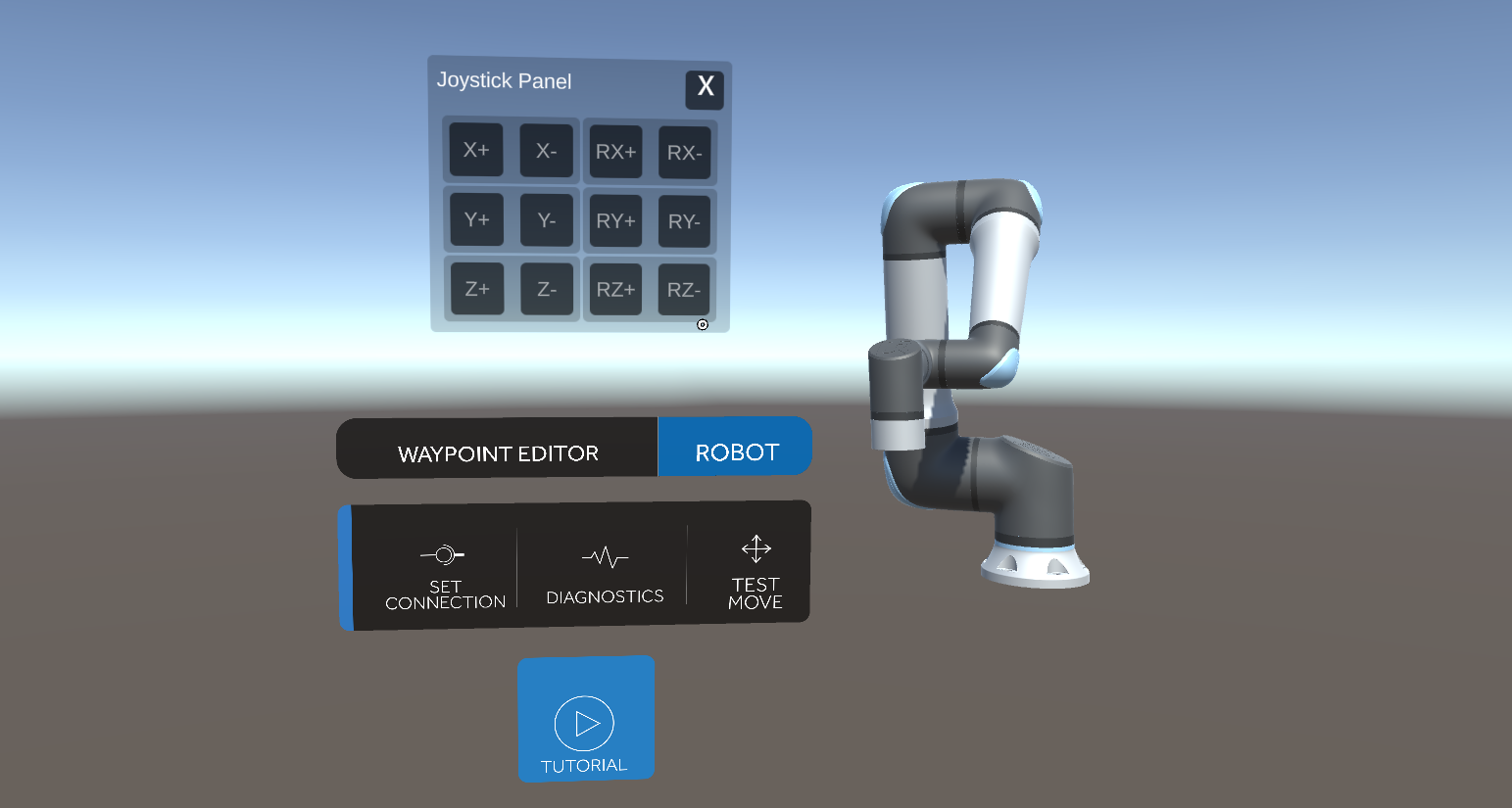
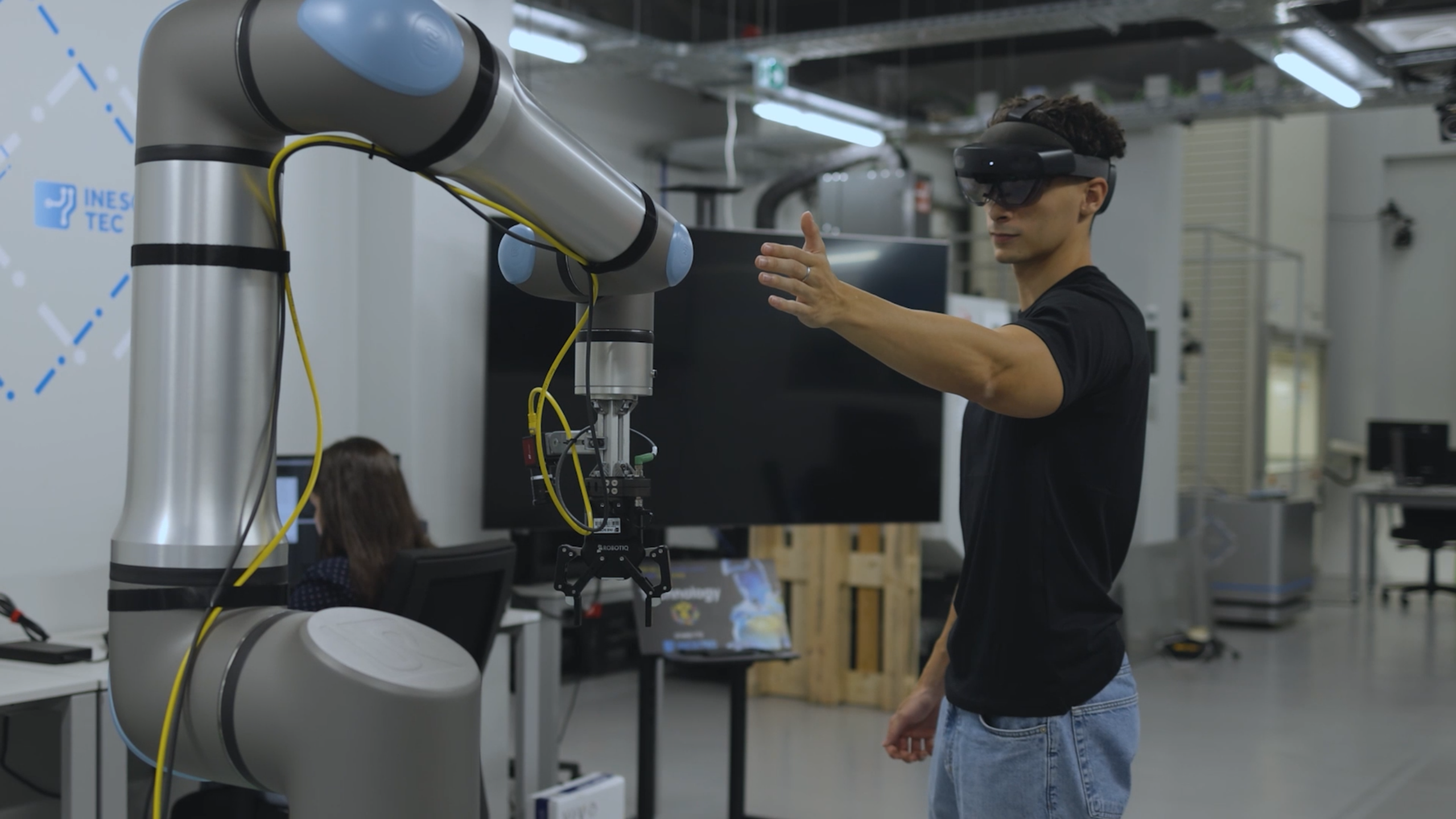
This work was developed as part of my master’s thesis and focused on creating an AR application that supports safer human robot collaboration. I designed and implemented an AR system that connects a HoloLens to a UR robotic arm, predicts the robot’s motion in real time and displays a ghost arm preview of planned trajectories. The application was developed using C# in Unity, URScript for robot control and TCP/IP networking for real time communication with both the simulator and the physical robot.
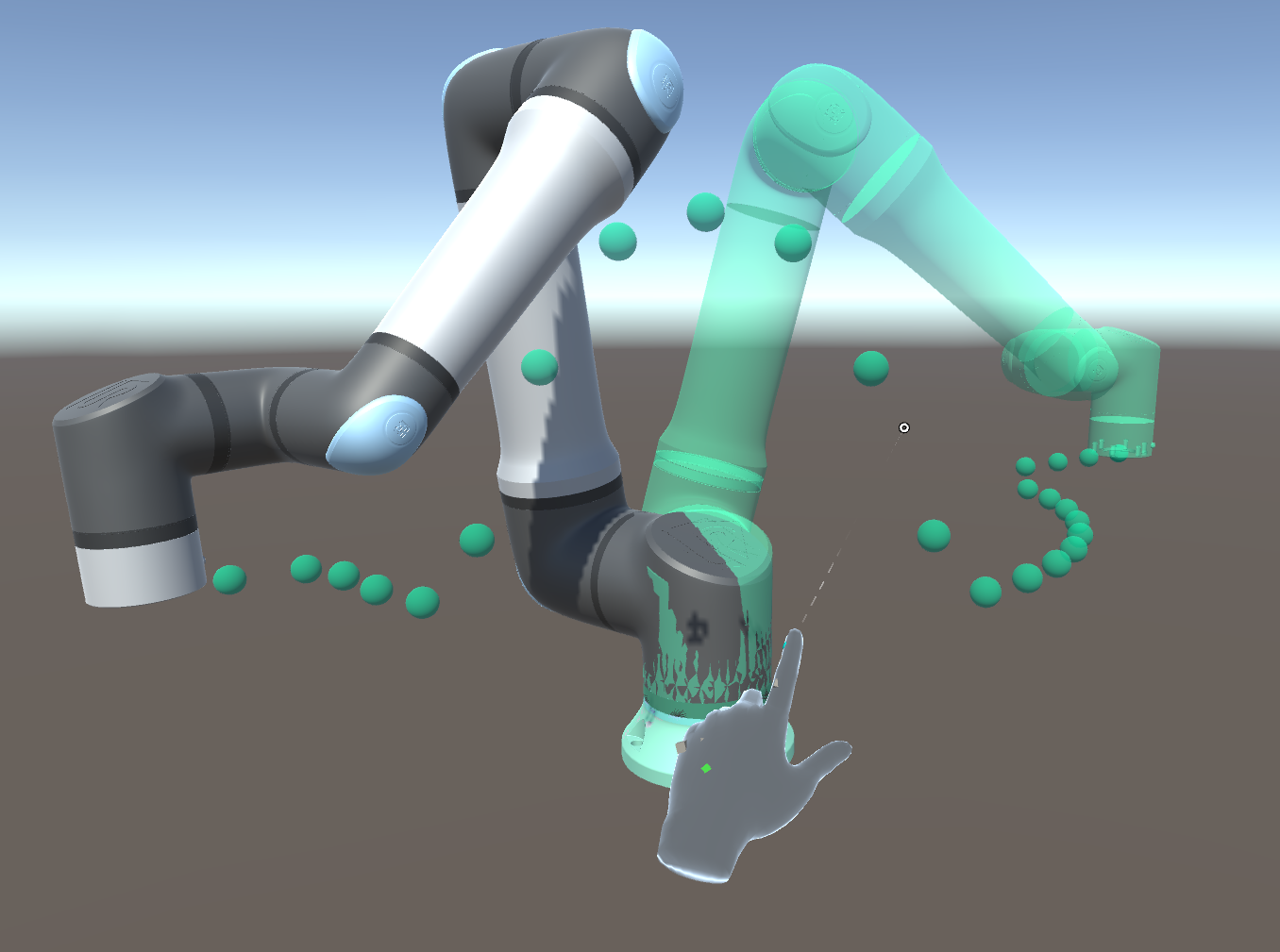
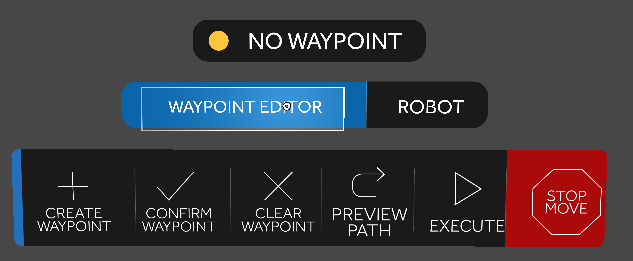
I built a waypoint editor in AR, implemented spatial alignment and tracking logic and added custom colliders and safety logic to handle dynamic collision avoidance based on the user’s hands and head. The system also includes a pause and resume mechanism that reacts to proximity and spatial tracking events.